University of Montenegro, NCC Montenegro’s affiliated partner, organized a EuroCC2 project meeting on December 13th, gathering deans, professors, and researchers from its Engineering and Science (Mathematics, Biology, Physics) Faculties, interested in HPC-powered research, development and innovation opportunities.
Professors Bozo Krstajic, UoM and Tomo Popovic, UDG provided introductory session on EuroCC2 project and joint UDG and UoM activities. Professor Luka Filipovic presented NCC Montenegro training activities, services and industry success stories.
The engaging discussion allowed academic participants to gain valuable insights into: HPC practical applications across various research domains, NCC infrastructure opportunities with Yotta Advanced Computing and application process for accessing EUROHPC resources. The next steps will be defined through HPC/AI-aligned research and project initiatives, and supported cooperation with public administration and big industry.
On 8 Dec 2023, a workshop on “Digital Transformation and HPC/AI” unfolded at the University of Donja Gorica. Over the course of this semester, final-year BSc students from the Faculty for Information Systems and Technologies delved into research on HPC and AI technologies within the framework of the Managing Information Technology subject. The EUROCC NCC Montenegro team conducted enlightening lectures and presentations on HPC and AI, providing students with a comprehensive grasp of these technologies and illustrating their pivotal roles in digital transformation.
Digital transformation and HPC/AI students workshop
During the workshop, students had the opportunity to showcase the projects they worked on throughout the semester, projects that will be defended during their final exam in Managing Information Technology course. The presented use cases spanned across various fields such as tourism, medicine, agriculture, and digital marketing. This event not only allowed students to share their findings but also fostered a deeper understanding of the practical applications of HPC and AI in real-world scenarios. Our focus was on the possible applications of interest for Montenegro and in the priority domains of Smart Specialisation Strategy for Montenegro (2014-2019).
Over 20 BSc students participatedAI powered chatbot for hotel receptionHPC/AI model cretion for sign languageHPC/AI for recognizing cultural and historic monuments Prediction of attendance of sport eventsUse of computer vision in medicineComputer vision for drones for prevention of forest fireComputer vision for precision agriculture and pest managementEvent took place at the University of Donja Gorica
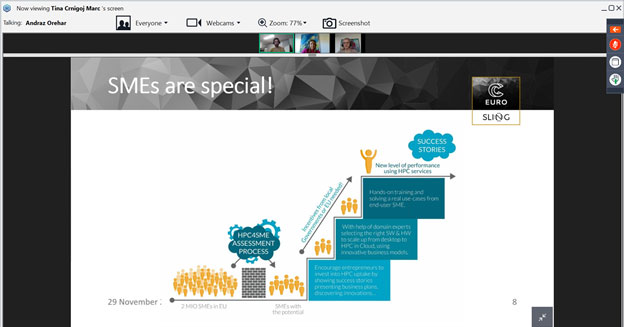
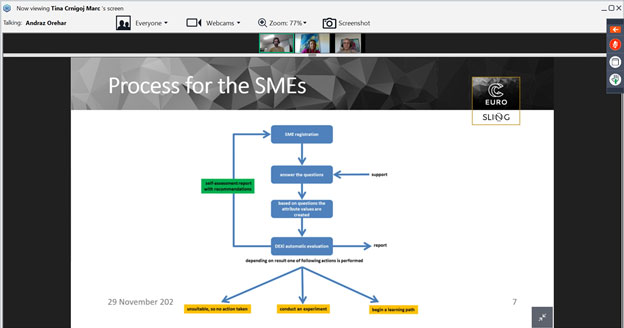
NCC Slovenia/Arctur d.o.o led and CASTIEL supported Task Force HPC4SME that successfully mobilised 17 NCCs within EuroCC2 footprint, in joint effort to upgrade HPC4SME Automated Assessment Tool for evaluation of Cloud HPC readiness of the European companies.
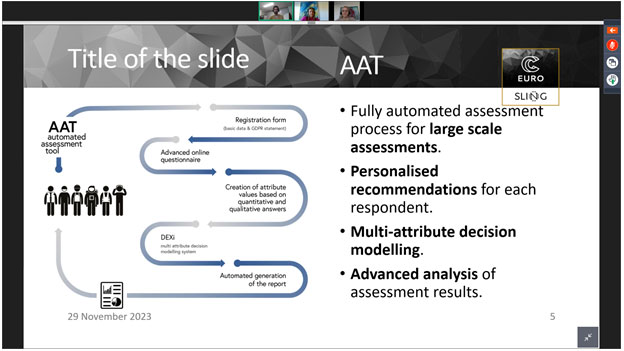
Task Force activities were focused on content update (questions, answers, info fields, report, translation), fine tuning of MADM (Multi- Attribute Decision -Making Model), beta testing with SMEs and service upgrade to the new AAT system.
The enhanced HPC4SME Tool was formally introduced during CASTIEL webinar for the Industry Working Group by Arctur team, focusing on SME’s evaluation benefits and supporting activities on NCCs market intelligence, competence mapping and industry steering process.
HPC4SME Automated Assessment Tool is already available at NCC Montenegro website https://eurocc.udg.edu.me/hpc4sme-assessment-tool/, providing an opportunity for Montenegrin companies to discover IF and HOW they can benefit from supercomputing services.
The Executive Office of American Chamber of Commerce and National Competence Centre for High Performance Computing Montenegro, organized joint workshop on innovative supercomputing technologies and applications on November 17th 2023 at University of Donja Gorica.
The AmCham member companies from various industry domains were greeted by Marko Mirocevic, AmCham Executive Director and Milica Vukotic, Dean of the Faculty for Information Systems and Technologies, emphasizing the importance digital acceleration and EuroCC2/Digital Europe project opportunities for enhancing industry innovations and competitiveness.
Representative of NCC Montenegro for industry cooperation, Sanja Nikolic introduced technical aspects and commercial applications of HPC systems, underlining transformative and innovative potential for the industry driven by integration of computational power (HPC/HPDA) and intelligent algorithms (AI/ML/DL). She also elaborated on EuroHPC supercomputing resources and access opportunities, as well as on possibilities for MNE companies to assess their HPC/AI readiness through HPC4SME self-evaluation tool (https://eurocc.udg.edu.me/hpc4sme-assessment-tool).
Representative of NCC Montenegro for service development, Luka Filipovic, presented new AI Master program and training courses, including Parallel Programing and Deep Learning, for enhancing HPC/AI skills, as well as other NCC services related to technical expertise, projects consultancy and preparation of use-cases for industry, academia and public sector. HPC/AI success stories in the areas of smart solutions for poultry farms, precise weather forecast in challenging topography of Montenegro, short-term predictive pricing in energy markets and personalized banking solutions, were presented in the constructive dialogues supported atmosphere.
AmCham members discussed challenges related to deploying AI models, issues with data availability and potential industry use-cases.
The joint event was great opportunity to promote supercomputing resources, applications and benefits available to Montenegrin companies, and to enhance industry interaction especially with the strategically aware and operationally proficient companies, to fully embrace future-proof technologies.
NCC Montenegro representatives Sanja Nikolic and Luka Filipovic gave a presentation for to the attendees of AI4S3.ME courses. The presentation covered the potential of using HPC/HPDA/AI technologies, advantages of utilizing distributed resources, the EuroHPC supercomputing opportunities, EuroCC2 project, NCC Montenegro activities and results.
Within the scope of focused communication and productive industry interactions, NCC Montenegro is organizing joint workshop with business association AmCham (American Chamber of Commerce) on 17.11.2023. Industry workshop will provide Montenegrin companies with:
Brief introduction to HPC systems, technologies, applications and benefits,
Presentation on HPC success stories and best practices from various industries,
Demonstration of the HPC4SME tool to evaluate companies’ HPC readiness
Presentation of HPC activities of NCC Montenegro,
Networking opportunities and follow-up consultations with HPC experts
We believe that this workshop will increase awareness on HPC&AI opportunities, provide valuable insights and inspirational use cases to the members and partners of AmCham Montenegro, enabling them to stay updated with the latest technologies and industry trends, and to discover supercomputing power to enhance their business and competitiveness.
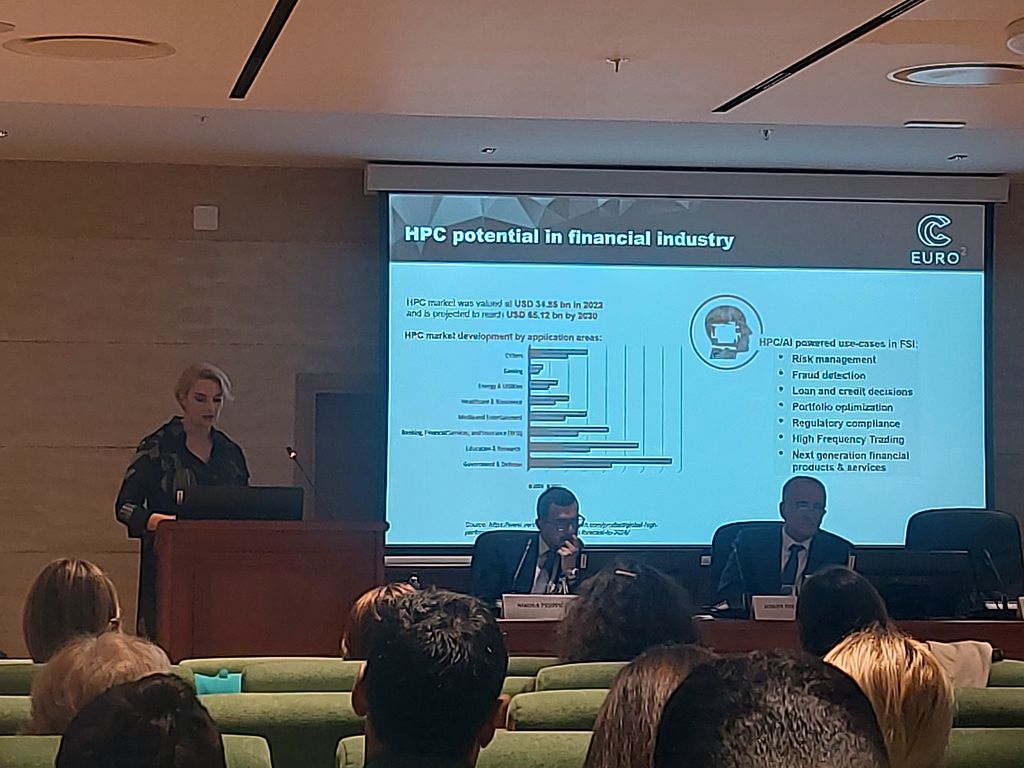
Representative of NCC Montenegro, Sanja Nikolic participated in the Round Table “Montenegrin Finance and Internationalization”, organized by Montenegrin Academy of Science and Art. On this event, topics related to the international competitiveness, financial opportunities and fast-paced digitalization with HPC&AI, were lively discussed with representatives of academia, banking sector, investment & trading institutions. Mrs. Nikolic presented technical and commercial aspects of HPC systems and emphasized HPC/AI powered use cases in the financial services industry. EuroCC/EuroCC2 supercomputing opportunities and NCC Montenegro activities related to HPC/AI study programs, trainings and industry success stories were also elaborated.